
The roads I take...
KaiRo's weBlog
| Zeige Beiträge veröffentlicht am 13.07.2018 und auf Englisch an. Zurück zu allen aktuellen Beiträgen | ||||||||||||||||||||||||||||||||||||||||||||||||||
13. Juli 2018
VR Map - A-Frame Demo using OpenStreetMap Data
As I mentioned previously, the Mixed Reality "virus" has caught me recently and I spend a good portion of my Mozilla contribution time with presenting and writing demos for WebVR/XR nowadays.
The prime driver for writing my first such demo was that I wanted to do something meaningful with A-Frame. Previously, I had only played around with the Hello WebVR example and some small alterations around the basic elements seen in that one, which is also pretty much what I taught to others in the WebVR workshops I held in Vienna last year. Now, it was time to go beyond that, and as I had recently bought a HTC Vive, I wanted something where the controllers could be used - but still something that would fall back nicely and be usable in 2D mode on a desktop browser or even mobile screens.
While I was thinking about what I could work on in that area, another long-standing thought crossed my mind: How feasible is it to render OpenStreetMap (OSM) data in 3D using WebVR and A-Frame? I decided to try and find out.



First, I built on my knowledge from Lantea Maps and the fact that I had a tile cache server set up for that, and created a layer of a certain set of tiles on the ground to for the base. That brought me to a number of issue to think about and make decisions on: First, should I respect the curvature of the earth, possibly put the tiles and the viewer on a certain place on a virtual globe? Should I respect the terrain, especially the elevation of different points on the map? Also, as the VR scene relates to real-world sizes of objects, how large is a map tile actually in reality? After a lot of thinking, I decided that this would be a simple demo so I would assume the earth is flat - both in terms of curvature or "the globe" and terrain, and the viewer would start off at coordinates 0/0/0 with x and z coordinates being horizontal and y the vertical component, as usual in A-Frame scenes. For the tile size, I found that with OpenStreetMap using Mercator projection, the tiles always stayed squares, with different sizes based on the latitude (and zoom level, but I always use the same high zoom there). In this respect, I still had to take account of the real world being a globe.
Once I had those tiles rendering on the ground, I could think about navigation and I added teleport controls, later also movement controls to fly through the scene. With W/A/S/D keys on the desktop (and later the fly controls), it was possible to "fly" underneath the ground, which was awkward, so I wrote a very simple "position-limit" A-Frame control later on, which prohibits that and also is a very nice example for how to build a component, because it's short and easy to understand.
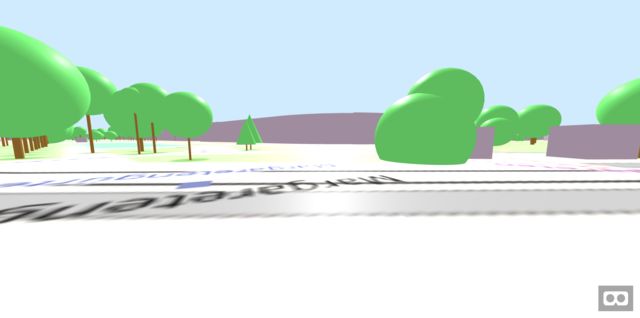
All this isn't using OSM data per se, but just the pre-rendered tiles, so it was time to go one step further and dig into the Overpass API, which allows to query and retrieve raw geo data from OSM. With Overpass Turbo I could try out and adjust the queries I wanted to use ad then move those into my code. I decided the first exercise would be to get something that is a point on the map, a single "node" in OSM speak, and when looking at rendered maps, I found that trees seemed to fit that requirement very well. An Overpass query for "node[natural=tree]" later and some massaging the result into a format that JavaScript can nicely work with, I was able to place three-dimensional A-Frame entities in the places where the tiles had the symbols for trees! I started with simple brown cylinders for the trunks, then placed a sphere on top of them as the crown, later got fancy by evaluating various "tags" in the data to render accurate height, crown diameter, trunk circumference and even a different base model for needle-leaved trees, using a cone for the crown.
But to make the demo really look like a map, it of course needed buildings to be rendered as well. Those are more complex, as even the simpler buildings are "ways" with a variable amount of "nodes", and the more complex ones have holes in their base shape and therefore require a compound (or "relation" in OSM speak) of multiple "ways", for the outer shape and the inner holes. And then, the 2D shape given by those properties needs to be extruded to a certain height to form an actual 3D building. After finding the right Overpass query, I realized it would be best to create my own "building" geometry in A-Frame, which would get the inner and outer paths as well as the height as parameters. In the code for that, I used the THREE.js library underlying A-Frame to create a shape (potentially with holes), extrude it to the right height and rotate it to actually stand on the ground. Then I used code similar to what I had for trees to actually create A-Frame entities that had that custom geometry. For the height, I would use the explicit tags in the OSM database, estimate from its levels/floors if given or else fall back to a default. And I would even respect the color of the building if there was a tag specifying it.
With that in place, I had a pretty nice demo that uses data directly from OpenStreetMap to render Virtual Reality scenes that could be viewed in the desktop or mobile browser, or even in a full VR headset!
It's available under the name of "VR Map" at vrmap.kairo.at, and of course the source code can also be expected, copied and forked on GitHub.
Again, this is intended as a demo, not a full-featured product, and e.g. does at this time only render an area of a defined size and does not include any code to load additional scenery as you are moving around. Also, it does not support "building parts", which are the way to specify in OSM that a different pieces of a building have e.g. different heights or colors. It could also be extended to actually render models of the buildings when they exist and are referred in the database (so e.g. the Eiffel Tower would look less weird when going to the Paris preset). There are a lot of things that still can be done to improve on this demo for sure, but as it stands, it's a pretty simple piece of code that shows the power of both A-Frame and the OpenStreetMap data, and that's what I set out to do, after all.
My plan is to take this to multiple meetups and conferences to promote both underlying projects and get people inspired to think about what they can do with those ideas. Please let me know if you know of a good event where I can present this work. The first of those presentations happened a at the ViennaJS May Meetup, see the slides and video.
I'm also in an email conversation with another OSM contributor who is using this demo as a base for some of his work, e.g. on rendering building models in 3D and VR and allowing people to correct their position data.
I hope that this demo spawns more ideas of what people can do with this toolset, and I'll also be looking into more demos that will probably move into different directions.
The prime driver for writing my first such demo was that I wanted to do something meaningful with A-Frame. Previously, I had only played around with the Hello WebVR example and some small alterations around the basic elements seen in that one, which is also pretty much what I taught to others in the WebVR workshops I held in Vienna last year. Now, it was time to go beyond that, and as I had recently bought a HTC Vive, I wanted something where the controllers could be used - but still something that would fall back nicely and be usable in 2D mode on a desktop browser or even mobile screens.
While I was thinking about what I could work on in that area, another long-standing thought crossed my mind: How feasible is it to render OpenStreetMap (OSM) data in 3D using WebVR and A-Frame? I decided to try and find out.
First, I built on my knowledge from Lantea Maps and the fact that I had a tile cache server set up for that, and created a layer of a certain set of tiles on the ground to for the base. That brought me to a number of issue to think about and make decisions on: First, should I respect the curvature of the earth, possibly put the tiles and the viewer on a certain place on a virtual globe? Should I respect the terrain, especially the elevation of different points on the map? Also, as the VR scene relates to real-world sizes of objects, how large is a map tile actually in reality? After a lot of thinking, I decided that this would be a simple demo so I would assume the earth is flat - both in terms of curvature or "the globe" and terrain, and the viewer would start off at coordinates 0/0/0 with x and z coordinates being horizontal and y the vertical component, as usual in A-Frame scenes. For the tile size, I found that with OpenStreetMap using Mercator projection, the tiles always stayed squares, with different sizes based on the latitude (and zoom level, but I always use the same high zoom there). In this respect, I still had to take account of the real world being a globe.
Once I had those tiles rendering on the ground, I could think about navigation and I added teleport controls, later also movement controls to fly through the scene. With W/A/S/D keys on the desktop (and later the fly controls), it was possible to "fly" underneath the ground, which was awkward, so I wrote a very simple "position-limit" A-Frame control later on, which prohibits that and also is a very nice example for how to build a component, because it's short and easy to understand.
All this isn't using OSM data per se, but just the pre-rendered tiles, so it was time to go one step further and dig into the Overpass API, which allows to query and retrieve raw geo data from OSM. With Overpass Turbo I could try out and adjust the queries I wanted to use ad then move those into my code. I decided the first exercise would be to get something that is a point on the map, a single "node" in OSM speak, and when looking at rendered maps, I found that trees seemed to fit that requirement very well. An Overpass query for "node[natural=tree]" later and some massaging the result into a format that JavaScript can nicely work with, I was able to place three-dimensional A-Frame entities in the places where the tiles had the symbols for trees! I started with simple brown cylinders for the trunks, then placed a sphere on top of them as the crown, later got fancy by evaluating various "tags" in the data to render accurate height, crown diameter, trunk circumference and even a different base model for needle-leaved trees, using a cone for the crown.
But to make the demo really look like a map, it of course needed buildings to be rendered as well. Those are more complex, as even the simpler buildings are "ways" with a variable amount of "nodes", and the more complex ones have holes in their base shape and therefore require a compound (or "relation" in OSM speak) of multiple "ways", for the outer shape and the inner holes. And then, the 2D shape given by those properties needs to be extruded to a certain height to form an actual 3D building. After finding the right Overpass query, I realized it would be best to create my own "building" geometry in A-Frame, which would get the inner and outer paths as well as the height as parameters. In the code for that, I used the THREE.js library underlying A-Frame to create a shape (potentially with holes), extrude it to the right height and rotate it to actually stand on the ground. Then I used code similar to what I had for trees to actually create A-Frame entities that had that custom geometry. For the height, I would use the explicit tags in the OSM database, estimate from its levels/floors if given or else fall back to a default. And I would even respect the color of the building if there was a tag specifying it.
With that in place, I had a pretty nice demo that uses data directly from OpenStreetMap to render Virtual Reality scenes that could be viewed in the desktop or mobile browser, or even in a full VR headset!
It's available under the name of "VR Map" at vrmap.kairo.at, and of course the source code can also be expected, copied and forked on GitHub.
Again, this is intended as a demo, not a full-featured product, and e.g. does at this time only render an area of a defined size and does not include any code to load additional scenery as you are moving around. Also, it does not support "building parts", which are the way to specify in OSM that a different pieces of a building have e.g. different heights or colors. It could also be extended to actually render models of the buildings when they exist and are referred in the database (so e.g. the Eiffel Tower would look less weird when going to the Paris preset). There are a lot of things that still can be done to improve on this demo for sure, but as it stands, it's a pretty simple piece of code that shows the power of both A-Frame and the OpenStreetMap data, and that's what I set out to do, after all.
My plan is to take this to multiple meetups and conferences to promote both underlying projects and get people inspired to think about what they can do with those ideas. Please let me know if you know of a good event where I can present this work. The first of those presentations happened a at the ViennaJS May Meetup, see the slides and video.
I'm also in an email conversation with another OSM contributor who is using this demo as a base for some of his work, e.g. on rendering building models in 3D and VR and allowing people to correct their position data.
I hope that this demo spawns more ideas of what people can do with this toolset, and I'll also be looking into more demos that will probably move into different directions.
Von KaiRo, um 23:28 | Tags: A-Frame, Mixed Reality, Mozilla, OSM, VR Maps, WebVR, WebXR | keine Kommentare | TrackBack: 1
